
1.六轴多关节机器人解决方案:
六轴多关节机器人,也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。每台机器人本体使用6台伺服电机,根据机器人的臂长及可抓取负载重量又分多种机型,所使用的伺服电机从几十瓦至几千瓦均有涉及。

应用领域: 工业机器人
方案说明: 六轴多关节机器人对于伺服电机的要求为高转矩、高转速、小尺寸、低转矩波动、高响应速度、长时间不间断运转具有可靠性,产品系列覆盖全面等要求。我司的KS系列(部分机型)伺服电机转子采用磁环式结构的,能够在不降低转矩的情况下做到高转速、小尺寸,同时又有非常好的转矩波动特性。我司产品覆盖了从50W至4.4kW的电机容量,可以应对大部分机器人机型使用需求。
方案优势: 产品系列覆盖全,客户可以一站式采购,在高可靠性的前提下提供更高的转矩-转速特性,提高机器人的运行效率同时,低转矩波动特性又保证了机器人的平稳运行。
2.SCARA机器人解决方案:
SCARA机器人又称水平多关节机器人,是一种圆柱坐标型的特殊类型的工业机器人,多用于高速组装、搬运、打磨、包装等行业。该机器人对于运行的节拍时间有着非常高的要求,需要高转速、高响应性的同时具有高过载能力。

应用领域: 工业机器人
方案说明: 我司有最高转速为6000rpm的小容量电机可供选择,实现设备高速运转,缩短节拍时间。同时可以配合光学23位多圈绝对值编码器,实现设备高定位精度。电机的优秀抗过载能力也使设备高负荷下连续运转成为可能。
方案优势: 高速及高响应性缩短设备节拍时间,高过载能力保证设备稳定运行。
3.机械手解决方案:
机械手又称直角坐标机器人,一般用于取料、搬运、分拣等。按照行业来分又可分为注塑机械手、机床机械手、压铸机械手、冲压机械手等。由于行业竞争激烈对于伺服电机的性能及价格有较高的要求。
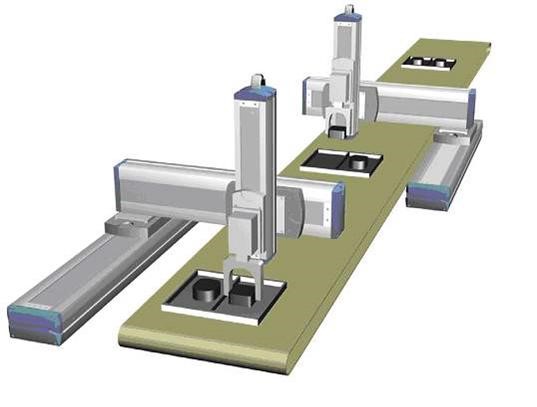
应用领域: 机械手
方案说明: 我司KJ系列的伺服电机设计之初就充分考虑了性能和成本的平衡性,可选成本相对较低的磁瓦式电机,光学增量式或磁编编码器。但同时为了保证电机的基本性能,又没有放弃行业内高性能伺服电机才有的5对10极结构。实现了性能和成本的兼顾性。
方案优势: 针对具体行业,在满足性能的同时,具有更优秀性价比。
4.自动锁螺丝机解决方案:
三轴型锁螺丝机,具有作业面范围广,自由灵活程度高,运行速度快,可手拖动Z轴进行螺丝点位快速定位,在空间小或产品大等方面的问题都得到很好的解决。与很多非标自动化设备一样,需要根据设备的特点对电机进行定制化,以适应设备的需求,达到提高设备的生产效率,实现电机与设备的完美匹配等要求。该客户在生产中发现由于电机自带线缆较短,需要延长,但延长线与电机线的对接插头在设备内部,当设备运转时转接头变成了容易发生接触不良的不稳定因素,同时生产时也有一定不便性。

应用领域: 自动化设备
方案说明: 为了实现设备组装时的便利性,同时减少中间转接插头提高设备的稳定性,客户提出了定制电机线缆及插头的需求,我司的伺服电机针对该设备的需求,提供了定制的线缆和插头,以及与客户驱动器相匹配的插头引脚定义。
方案优势: 针对客户具体需求,可灵活定制电机,解决客户痛点。
5.锂电池生产设备(电芯制片卷绕机)机解决方案:
设备用于方形锂离子电池电芯的制作。通过自动放卷,自动纠偏,张力控制,极耳翻折检测,卷绕,贴终止胶、CCD错位检测、短路检测、下料到输送带等动作,完成电芯制作。由于生产过程中需要自动放卷及较高精度的张力控制,对于电机转矩输出的稳定性及转矩波动有很高要求。
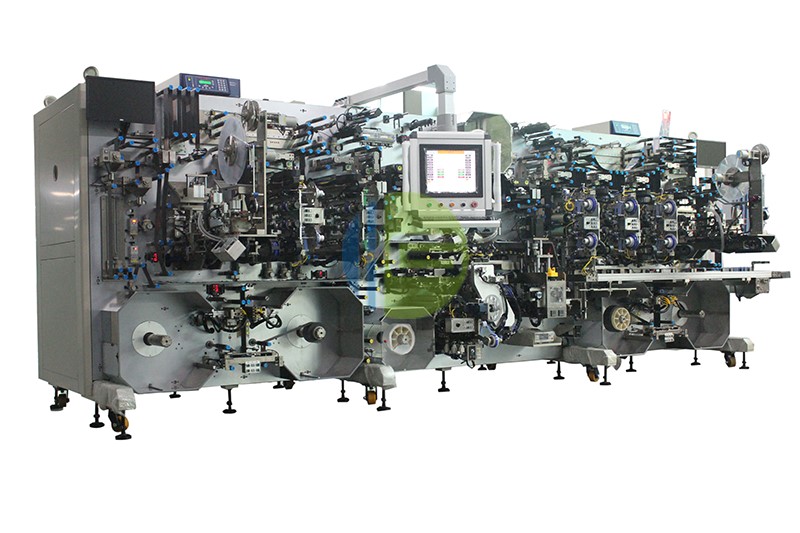
应用领域: 自动化设备
方案说明: 我司130及180法兰系列电机也采用了80法兰以下小容量伺服的10极12槽结构,虽然产品成本较高但是该结构电机具有更好的实时响应性,可以配合设备的快速加减速及张力调整动作。同时该结构的低转矩波动特性也使得电机在运行过程中转矩输出的稳定性得到保证。
方案优势: 电机响应快,转矩波动低。







